|
RASPBERRY Pi - LEARNING HOW TO MAKE YOUR ROBOT WORK
|
|||||||||||||||||||||||||||||||||||
|
NECK JOINT - Let loose in the robot store, a young engineer checks out the range of movement of Dino's head mountings. Plug and Play computers do not need students to know much about structural design, welding or other engineering problems, they can just concentrate on learning how to make machines obey digital commands. The engineering grunt comes after the intellectual workout.
You might think it strange that the makers of so-called educational computers are so busy trying to maintain their market share that they failed to see the logic of working to the same basic voltage in selecting their architecture, so as to be more compatible with one another. If they were compatible they would be more efficient and the world would be slightly more sustainable in the reduction of energy and time used by humans to create robots for a better world. KISS
ABOUT RASPBERRY Pi and ARDUINO COMPUTERS
The Arduino is a wonderful platform for handling the lower level work of a robot - reading sensors, driving servos, and blinking lights. There is a fair amount of RAM on board, and it is programmable in C++, so you can write decent amounts of code, and basic autonomous robot behavior is well within its capabilities.
While it is extensible, meaning that you can add to and expand upon the basic board with future potential built in - you can buy Arduino shields to do a wide variety of things - it doesn't have an Operating System (OS) per se. Arduino has a great deal of support for accessing the board and driving servos, etc., but it is limited and doesn't provide what an OS provides, e.g., multiple processes or threads of execution, signals, IPC and so on.
IPC - In computer science, 'Inter Process Communication' (IPC) refers specifically to the mechanisms an operating system provides to allow processes it manages to share data. Typically, applications can use IPC, categorized as clients and servers, where the client requests data and the server responds to client requests. Many applications are both clients and servers, as commonly seen in distributed computing. Methods for achieving IPC are divided into categories which vary based on software requirements, such as performance and modularity requirements, and system circumstances, such as network bandwidth and latency.
Signal, or Asynchronous System Trap (AST) is a system message sent from one process to another, not usually used to transfer data but instead used to remotely command the partnered process, hence IPC. This is more common in robotics where we are using machines to do things based on what the machine knows about its surroundings.
MOTORS - We need two separate motors to power our ant robot, one motor for each side of the giant insect. This will allow us to steer the DinoBot. Slowing down one set of legs will cause Dino to turn in the direction of the legs working the slowest. The motor and gearbox that Ryan is inspecting is a 500 watt unit more commonly used to propel electric cycles. It's a teensy bit more powerful that the Lego or other VEX, STEM plug and play systems and way too expensive to learn with, but once beginners have mastered the basics using low powered robots, they may want to stretch their imaginations with projects that can do useful things in the real world. This hexapod platform could be the basis of a rescue robot, to carry humans from dangerous crash sites, or compromised nuclear plants where uneven surfaces might defeat a tracked vehicle.
ARDUINO + POINTS - When you think of Arduino, think of a great platform for hooking up sensors and servos, and the like, and getting access to a wonderful library of functions that make reading sensors and driving servos very easy.
RASPBERRY Pi + POINTS - The Pi provides Input and Output ( I/O) lines but no supporting library per se like you get with Arduino. You can do much of what you want in terms of reading sensors and driving servos from the Raspberry Pi, but it is probably better done on the Arduino.
What Raspberry Pi can provide that is out of reach of Arduino
is an operating system of the stature of Linux (Fedora and others), and with that all the support that Linux provides for non-trivial devices like USB Ethernet, USB cameras, etc. It also gains you access to the wide array of powerful libraries written for Linux like OpenCV for image processing and
hundreds (thousands) of others - pretty much anything that you would find on a desktop system is going to be available or portable in theory to Linux running on Raspberry Pi. It also provides orders of magnitude more processing power and memory, which will help in doing that tasks that a more sophisticate robotics application will need to perform.
The basic architecture of a Raspberry Pi/Arduino robot would be something like this:
1. Logic for interacting with robot hardware on the Arduino, and the brains of the robot on Raspberry Pi.
2. Add an Ethernet shield and send messages between the two (sensor status from Arduino to Raspberry Pi, and control commands (e.g., servo commands) from Raspberry Pi to Arduino).
3.
Or wire together the serial lines and send commands and data over serial
(preferred, since it uses less power and probably less code to implement).
ROBOT INSECT PARTS - Ryan checks out the 2kW hour 48 volt lithium battery pack and the electronic speed controllers for the two 500 watt 2/3rd horsepower motors. That means that combined, this robot hexapod will have the power of 1.34 horses. Of course that all depends on the efficiency of the motors and drive train. In reality it will be more like a half a horse. A horse is a much bigger animal that our DinoBot.
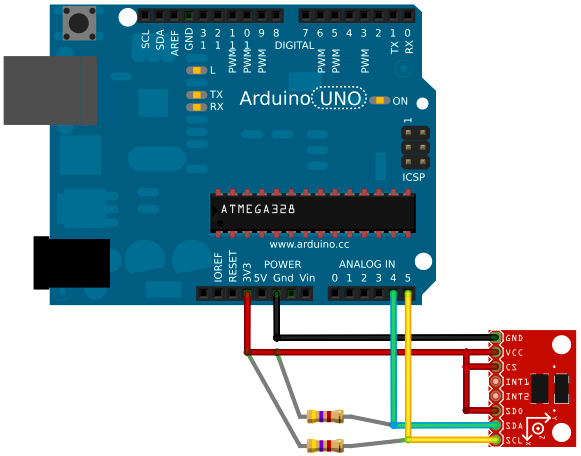
COMPATIBILITY - A 3.3V I2C component can be connected directly to the Arduino, by using the 3.3V of the Arduino board, and using two 4k7 pull-up resistors to the 3.3V, but you have to know the risks. The Arduino boards use AVR microprocessors, most of which run at run at 5 Volts, and most of those Arduino Boards have a voltage regulator for 3.3 V which can be used for those components that need it.
OTHER INCOMPATIBILITY ISSUES
Raspberry Pi is great tool for embedded engineers but it lacks ADC. One more draw back is all of its IO’s are 3.3V level. On the other side Arduino is good at sensing the physical world using sensors. To get benefits of both the systems one may want to interface them.
SPI is an synchronous interface that uses a dedicated clock signal. The device considered the 'Master' provides a clock signal used to synchronize data transactions between the two devices.
The main problem arises when we try to make physical connection between the two boards because they are working on different voltage levels. We need to use level shifters to avoid any damage to the Raspberry Pi and to get expected results.
There is a nice blog on arduino forms. You can build level shifters by looking at this blog. Once we have a physical connection between the two micro computers, they can start talking to each other. On Pi side you can use any of your favorite programming languages.
Learning how to program a computer to control a moving object, react to sound or other moving objects, tell the time or measure temperature is not as difficult as it first seems using the latest educational aids from several different manufacturers, even if there are compatibility issues. And why are there so many different programming languages? Once again, we are building in difficulties for ourselves and wasting human lives writing code again and again to achieve the same outcome. For a bunch of clever people, computer engineers are quite stupid. Keep It Simple Stupid.
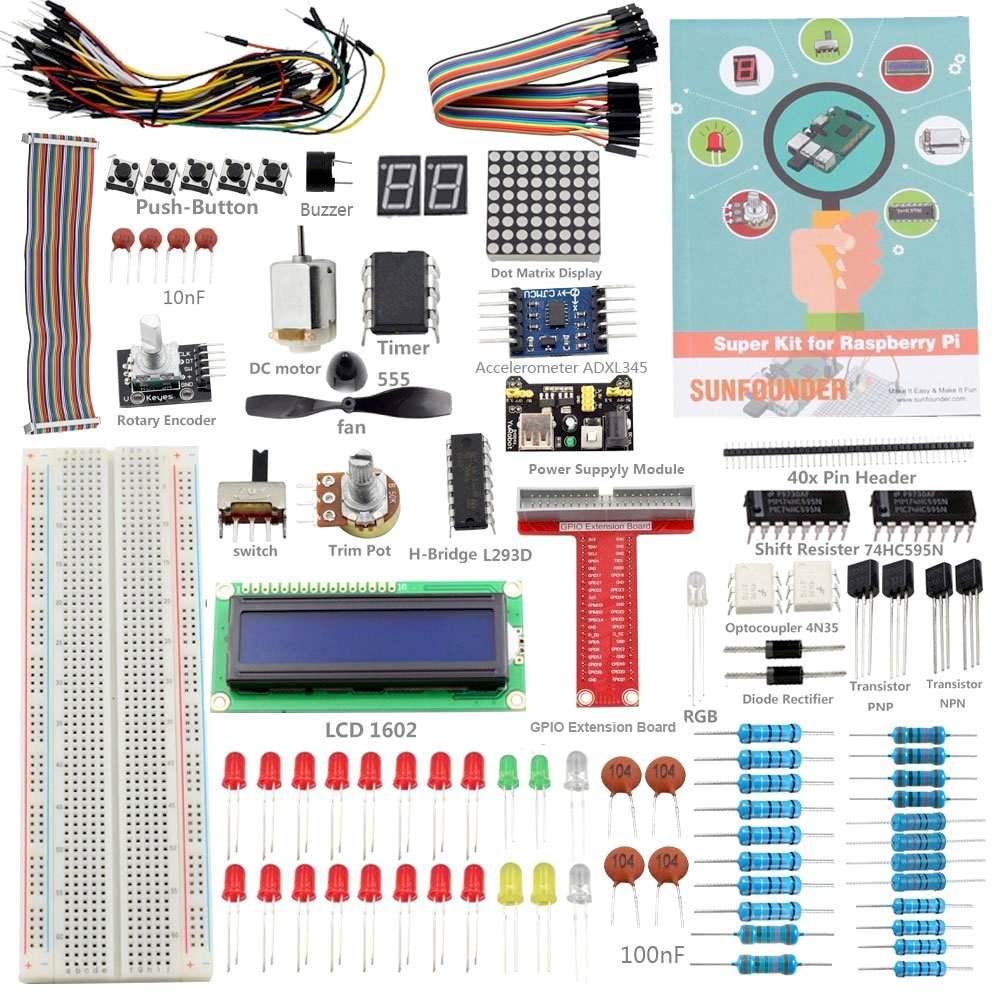
RASPBERRY Pi STARTER KITS
NATURAL VARIATION - Despite their reputation as pests, the trillions of insects, bugs, and spiders that inhabit Planet Earth can make some of the most fascinating and dramatic close-up photography subjects and some of the best robots in the world.
THE
GUARDIAN 12 DECEMBER 2016
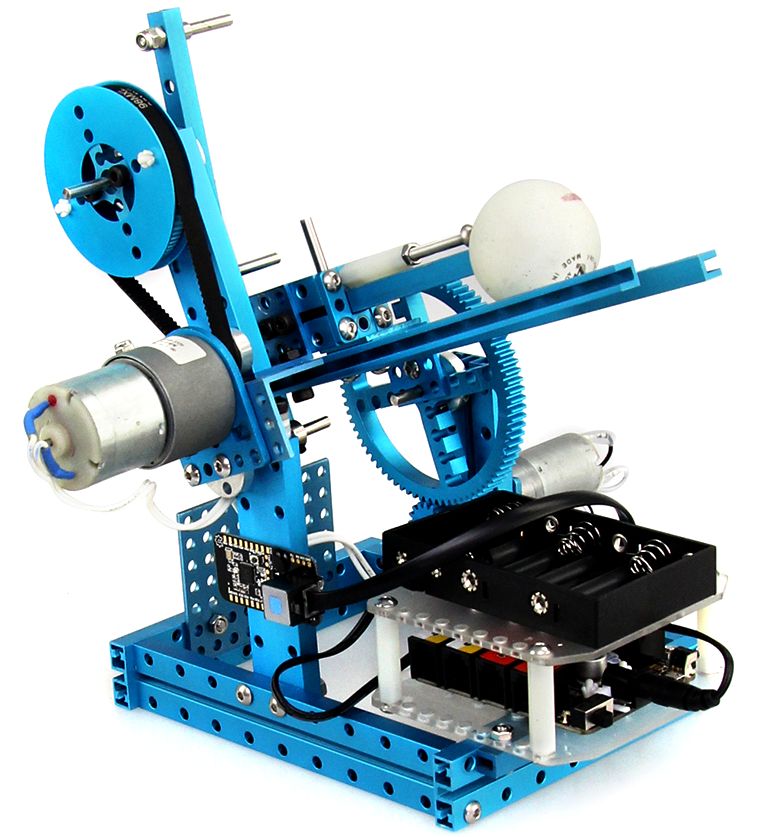
MAKEBLOCK - This is a more advanced version of the Lego Mindstorms Brick concept, mixed in with a bit of Meccano thinking and it looks good. These robot kits use Arduino and Raspberry Pi computers to navigate their world and perform simple tasks.
THE GUARDIAN 26 NOVEMBER 2015
The British-made computer is as comfortable in the classroom as on the kitchen table – we want to hear about your successful (and not so!) projects.
RASPBERRY Pi - Your computer board and other electronic components should come in protective plastic packets to prevent static electricity damage. A stand with clamps and magnifying glass will help you when it comes to fiddly soldering. Make life easier by using these low cost items in your laboratory, classroom or on your kitchen table. Sorry Mum!
THE GUARDIAN 14 JAN 2016
Finally, a nu-metal revival we can all get behind. After more than a decade rusting on the TV scrapheap, Robot Wars has been reactivated. The
BBC has announced plans to bring the bombastic pageant of radio-controlled droid proxies engaging in gladiatorial combat backs to our screens for a new six-part run later this year. The original series, which originated in the cyberpunk era of the late 1990s before perishing in the post-apocalyptic wasteland of the Channel 5 schedules in 2003, was a scrappy but absurdly entertaining showcase of weaponised Roombas scuttling around a booby-trapped Thunderdome, an arena where overclocked house sentinels like Shunt and Sir Killalot roughed up most of the civilian challengers with ease.
Even viewed from ergonomic and app-happy 2016, the grungy Robot Wars still seems considerably ahead of its time. The producers coined the word “roboteers” to describe the teams of enthusiasts who designed and built their machines from scavenged parts, power tool components and golf cart engines. That swashbuckling term helped recast these cheerfully nerdy hobbyists as Dumas-like warrior-inventors, precursors to the ice-cool wave of hackers and heavily bearded disruptors who comprise the currently celebrated movement of hands-on bootstrappers called “makers”.
That’s why it’s the perfect time to bring Robot Wars back. Imagine what a new generation of roboteers will be able to achieve, these digital natives to whom rigging up GoPro cameras, flying quadcopter drones and ingeniously programming Raspberry Pi mini-computers is already second nature. The first wave of homebrew Robot Wars challengers wore their spot-weld scars and repurposed sheet metal with a certain scuffed pride. Thanks to the advent of 3D-printing, roboteers will now be able to achieve previously unimaginable designs with elaborate body panelling. Perhaps the next Robot Wars champion will embody beauty as well as durability, some Jony Ive along with its Mad Max.
Aesthetics, education, innovation: these are all laudable aims. No true heir to the Robot Wars name can deny the tension that exists at its heart, though. The audience and viewers are invited to admire the ingenuity of the roboteers, but that honourable applause is usually drowned out by cheers as their creation gets abruptly reduced to its component parts by a gas-propelled hatchet, left sputtering and malfunctioning in a pool of its own brake fluid.
The BBC may still feel obliged to big up the educational aspect of the show – the official press release describes Robot Wars as “content-rich factual entertainment” – but teachable moments are actually baked-in to the premise. Watching something you’ve spent innumerable man-hours working on get smashed to pieces by an uncaring universe in the form of apex predator Sergeant Bash will always be a valuable life lesson. It should make for riveting viewing.
R-TECH & ROBO CHALLENGE Q & A
Q - How did Robo Challenge get involved with Robot Wars?
A Sectasaur™ (thawed) - now on permanent display at Herstmonceux Museum, in Sussex, England.
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIPEDAL HUMANOIDS - BLACK BOX - CHAT GPT - ELECTRONICS - ENERGY - FRAME - FORMICARIUM HEAD - INVISIBILITY - JAWS - KITS - LEGS - MECHANICS - MOTORS - MOVIE - RASPBERRY Pi - R/C DRONE - SENTRY - SOFTWARE SIM CARDS - SMARTPOHNES - SOUND PROOFING - SPACE ROVERS - SPEED - STEM - SUSPENSION - TAIL - WEAPONS - WARGAMING
|
|||||||||||||||||||||||||||||||||||
|
This webpage is Copyright © 2023 Jameson Hunter Limited. The name DinoBot™ in relation to educational robotic kits is a trademark, though these articles on insects and hard and software is not-for-profit and may be freely quoted with or without a back-link but that a credit would be appreciated. All other trademarks are hereby acknowledged. The design of the Robot Ant on this series of pages is design copyright © December 23 2016, all rights reserved - Jameson Hunter Ltd.
|