|
DINO the DINOBOT - MOTORS & CONTROLLERS
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
MOTIVATION - Almost every movement on an animatronic requires a separate motor and gearbox. Electricity and then magnetism were two of the most important discoveries of man. We entered the modern age of electricity in the 1900s with the mass introduction of electric lighting and municipal generating utilities. We take all of that for granted but we should not ignore our roots. Dino's head uses three dc brushed motors to move up and down and left to right, and to open and close those magnificent mandibles.
CHRISTMAS ROBOT - DINO THE DINOBOT
Christmas has come and gone, but there is some January snow to keep us in the right mood to complete Dino as the giant ant animatronic is now known, and this brings us onto one of the most important subjects concerning any medium sized robot.
Almost all robots are powered by electric motors. There are some that are so large that they need internal combustion engines, such as the Mantis and Stompy or the MegaBots, but fascinating as they are, we are not concerned with those in this article.
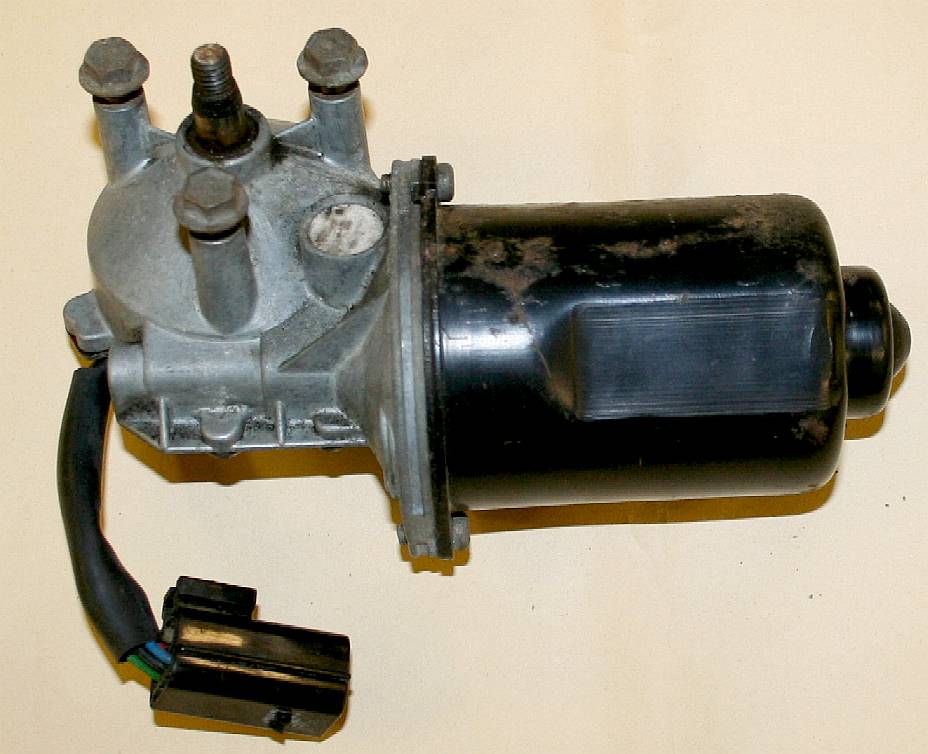
MOTORS - This is a Delco wiper motor as used for a number of road vehicles. This unit can deliver 180 watts or a 1/4 hp - very inefficiently with worm drive. We will be testing the transmission on the giant ant under no-load conditions - so for static tests two of these units will be fine. In theory they could drive a 140lb (63kg) ant at 2 feet per second, or roughly 1.25 mph. Not a lot of good for war gaming. In practice we'd be looking at one mile an hour after losses. A slow walking speed for a human is 3.1 mph. The power to weight ratio with these motors is: 280 lbs per horsepower. Not good. Stompy is much better.
A BIT OF MOTOR HISTORY
The
pioneering greats in the hunt for clean motive power are Allessandro
Volta (battery 1800), Michael
Faraday (electromagnetic rotation 1821). With the invention of the battery, the generation of a magnetic field from electric current (Hans Christian Oersted, 1820) and the electromagnet (William Sturgeon, 1825) the foundation for building electric motors was laid.
DC motors
have a dominant market position today in the low power (below 1 kW) and low voltage (below 60 V)
range, though this is creeping up. The years 1885 until 1889 saw the invention of the three-phase electric power system which is the basis for modern electrical power transmission and advanced electric motors.
CHOOSING YOUR MOTORS
When looking at how to power your DinoBot, you will be tempted to go for the most powerful setup possible, but this is also the most expensive option. Unless you are going for a world record, you may want to rein back a little and think about endurance and your poor battery pack.
We've got the design down to two main motors for locomotion. You'll need more motors for tricks, but we are not letting on how to do that at the moment. With only two motors and controllers the whole setup is very economical.
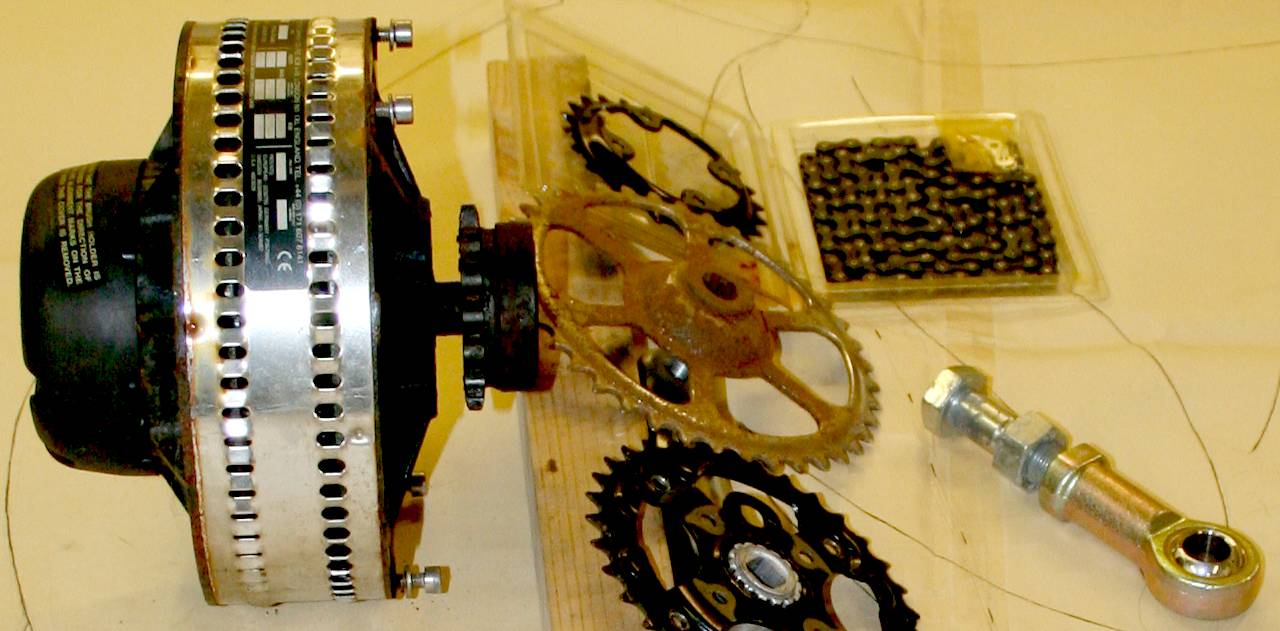
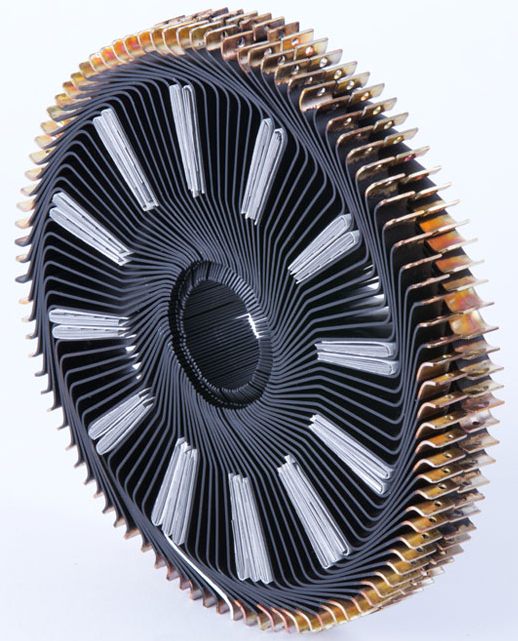
LYNCH DC POWER - This is a DC pancake (radial armature) motor from Cedric Lynch - who is a very clever electrical engineer. It is rated at 10kW or 13.4 hp. Cedric does a smaller 3kW unit for robotic applications. A 200lb robot with 13 horsepower could sprint along nicely @ 35 feet per second 'in theory,' or 23 mph, around 16mph in practice. That is more like it. But we won't be doing that just yet. Although we do have two of the 10kW motors on hand, should the mood take us, or any customer. The power to weight ratio is 15lbs per horsepower, or 150 hp/ton, is the way automotive engineers compare performance (bhp/ton). Compare that to Stompy's 44.5lbs/hp. Stompy should be able to achieve 7.5 mph - when it is working 100% efficiently. With hydraulics you lose a lot of power in the transmission, and the mass of those steel legs is just short of JCB technology - so we'll not hold our breath. We might have considered alloy for the legs at least. More hassle welding, but worth it. KISS. CONTACT CEDRIC LYNCH: Tel: +44 (0) 1404 892940 - Fax: +44 (0) 1404 891990 - Lynch Motor Company Ltd, Unit 27 Flightway Business Park, Dunkeswell, Honiton, Devon, EX14 4RJ
CHEAPER MOTOR OPTIONS - [LEFT] a 350w motor. [RIGHT) a 450w motor with reduction box. Two of the 450w units would give us about 2.5 mph. Six would give us 2.7kW and over 5mph. China produces hundreds of motor combinations at sensible prices. Unfortunately they are brushed motors in the main, so not as efficient as they might be, compared to some of the more modern cordless drill motors and vacuum cleaners (Dyson).
MOTORS - Where you can't beat China for price, the above is a selection of mid-range priced, higher output motors from a US robotic supply site for 12-48 volts. From left to right: 2.1hp ($109), 4.6hp ($339) and 7.8hp ($449) DC brushed motor variants. The four brushed design on the right uses rare earth magnets and has forced air cooling. Speed controllers will be around another $450. Where motor manufacturers usually fall down is in not supplying a range of gears or sprockets to bolt onto their shiny output shafts. Chinese suppliers mostly have this covered.
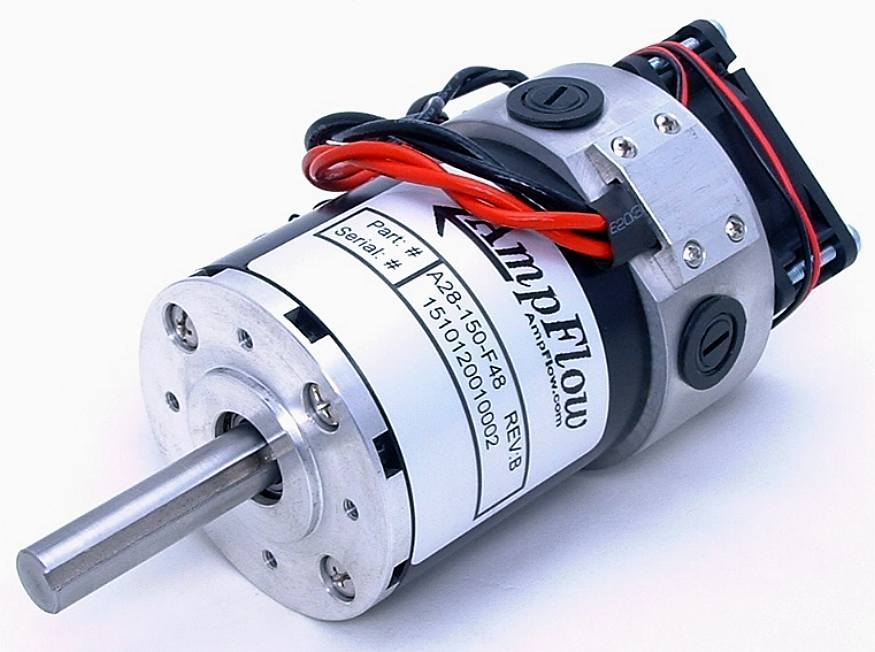
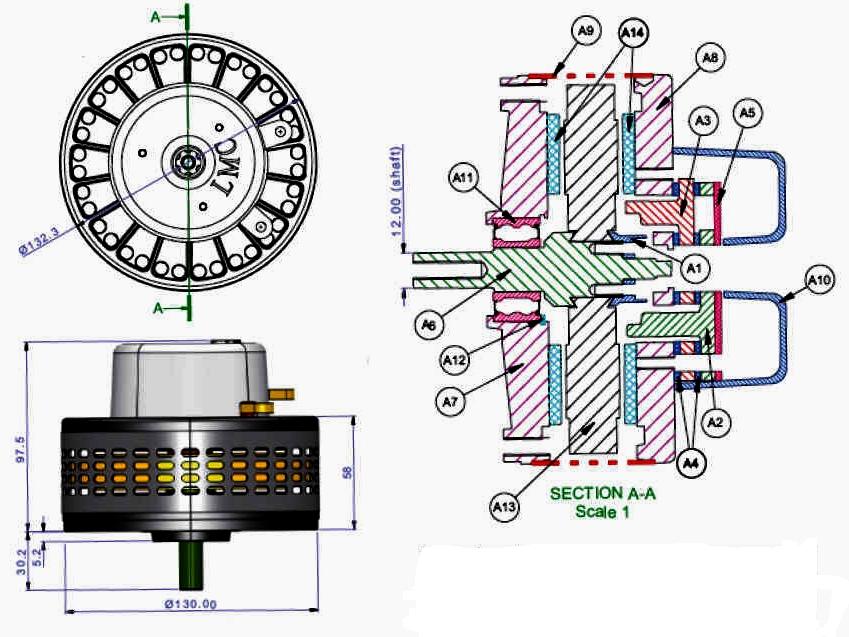
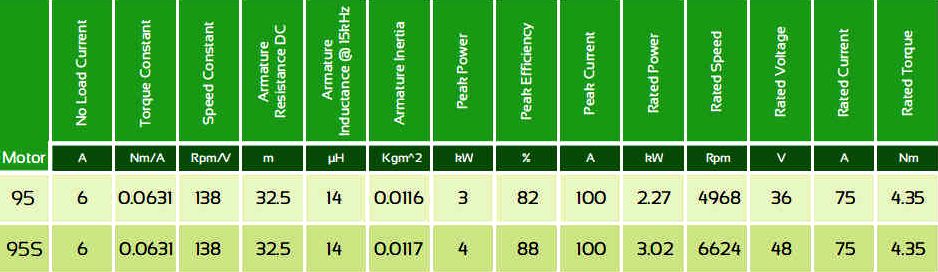
LYNCH LEM 130 - The Lynch motor is a more expensive option, but is a proven light traction motor for robotic applications. If choosing a Lynch motor, go for the 95s and 48 volts to get the best efficiency. That would give you 6kW (8hp) in total and a walking speed of around 10mph.
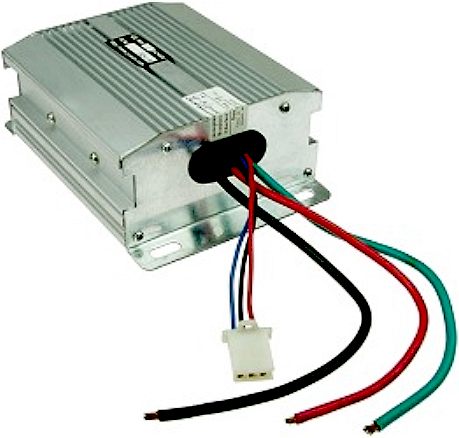
I FEEL THE NEED, THE NEED TO CONTROL MY SPEED - LEFT: KDZ48303GDV KDZ Sep-Ex Motor Speed Controller - Kelly KDZ programmable sep-ex motor controller provides efficient, smooth and quiet controls for electrical vehicles like golf carts, electric motorcycles, fork lifts, as well as electric boats and industry motor speed control. Motor speed controller uses high power MOSFET, fast PWM to achieve efficiency 99% in most cases. Powerful microprocessor brings in comprehensive and precise control to brushed motor controllers. This programmable brushed motor controller also allows users to set parameters, conduct tests, and obtain diagnostic information quickly and easily. $199
MIDDLE: 48V 1500W Electric Scooter Speed Controller - Designed for 48 Volt DC electric scooter and bike motors up to 1500 Watts. Recommended motor size 1000W-1500W. Can be used to power two 500W-750W motors simultaneously. Maximum current 45 Amps. Under Voltage protection 41 Volts. Current limiting feature prevents controller damage due to over-current conditions. Under voltage protection feature prevents over-discharge and extends battery life. Compatible with all standard 3-wire variable speed hall-effect throttles. Item # SPD-481500 $79
MOTORS - Here we see a 48 volt 2kW hour lithium battery pack, two 500 watt motors with gear reduction and two 500w electronic speed controllers.
USEFUL FORCE CONVERSION TABLE
Movie idea, lurking beneath the Antarctic ice is a discovery that scientists will die for. This story is now the subject of a low budget trailer to be produced mostly in the UK. The promoters are looking for backers. The UK will contribute 20% toward production costs. Roughly 60% of a low budget film may be pre-sold as distribution rights, leaving 20% finance to source. The deal is that investors recover 120% on their project stake within 12 months of shooting, with an income stream thereafter from networks and merchandising. Producers and directors please take note that there is a significant audience for well made movies of this genre. Look at what happened when they remade Godzilla.
A Sectasaur™ (thawed) - now on permanent display at Herstmonceux Museum, in Sussex, England.
ANTICS - ARDUINO - ARMOUR - ARTWORK - BIPEDAL HUMANOIDS - BLACK BOX - CHAT GPT - ELECTRONICS - ENERGY - FRAME - FORMICARIUM HEAD - INVISIBILITY - JAWS - KITS - LEGS - MECHANICS - MOTORS - MOVIE - RASPBERRY Pi - R/C DRONE - SENTRY - SOFTWARE SIM CARDS - SMARTPOHNES - SOUND PROOFING - SPACE ROVERS - SPEED - STEM - SUSPENSION - TAIL - WEAPONS - WARGAMING
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This website is Copyright © 2023. The design of the Robot Ant on this page is design copyright © December 15 2015, all rights reserved - Jameson Hunter Ltd. IMPORTANT NOTE: Under no circumstances may our products, or those of Jameson Hunter Ltd, be used by any military or law enforcement organization, for any warlike, combat, or peacekeeping crowd control purposes. Anyone purchasing one of these units will be required to sign a binding undertaking (Deed) to that effect. Any unit found to have been purchased by proxy, will be confiscated, along with civil remedy in respect of breach of contract, that all parties in the chain will be vicariously liable for - to include damages for vehicles developed from our designs without our consent - and possible fraud issue from the deception. In addition to copyright theft, the law of passing-off applies.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||